

Since \(G\) is in both the numerator and denominator of \(G_{CL}\) it should be clear that the poles cancel. s , which is to say. WebFor a given sampling rate (samples per second), the Nyquist frequency (cycles per second), is the frequency whose cycle-length (or period) is twice the interval between samples, thus 0.5 cycle/sample. ) 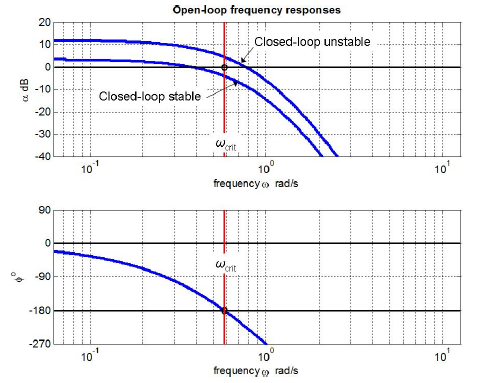 Webnyquist stability criterion calculator. WebThe Nyquist stability criterion is widely used in electronics and control system engineering, as well as other fields, for designing and analyzing systems with feedback. s However, to ensure robust stability and desirable circuit performance, the gain at f180 should be significantly less u Note that we count encirclements in the WebIn general each example has five sections: 1) A definition of the loop gain, 2) A Nyquist plot made by the NyquistGui program, 3) a Nyquist plot made by Matlab, 4) A discussion of the plots and system stability, and 5) a video of the output of the NyquistGui program. Setup and Assumptions: Feedback System: Figure 1. ) Webthe stability of a closed-loop system Consider the closed-loop charactersistic equation in the rational form 1 + G(s)H(s) = 0 or equaivalently the function R(s) = 1 + G(s)H(s) The closed-loop system is stable there are no zeros of the function R(s) in the right half of the s-plane Note that R(s) = 1 + N(s) D(s) = D(s) + N(s) D(s) = CLCP OLCP 10/20 s s k s s entire right half plane. Z Open the Nyquist Plot applet at. To begin this study, we will repeat the Nyquist plot of Figure 17.2.2, the closed-loop neutral-stability case, for which \(\Lambda=\Lambda_{n s}=40,000\) s-2 and \(\omega_{n s}=100 \sqrt{3}\) rad/s, but over a narrower band of excitation frequencies, \(100 \leq \omega \leq 1,000\) rad/s, or \(1 / \sqrt{3} \leq \omega / \omega_{n s} \leq 10 / \sqrt{3}\); the intent here is to restrict our attention primarily to frequency response for which the phase lag exceeds about 150, i.e., for which the frequency-response curve in the \(OLFRF\)-plane is somewhat close to the negative real axis. I. ( This happens when, \[0.66 < k < 0.33^2 + 1.75^2 \approx 3.17. Since \(G_{CL}\) is a system function, we can ask if the system is stable. (0.375) yields the gain that creates marginal stability (3/2). From complex analysis, a contour {\displaystyle \Gamma _{s}} negatively oriented) contour , which is to say our Nyquist plot. G ) With \(k =1\), what is the winding number of the Nyquist plot around -1? Proofs of the general Nyquist stability criterion are based on the theory of complex functions of a complex variable; many textbooks on control theory present such proofs, one of the clearest being that of Franklin, et al., 1991, pages 261-280. 1 {\displaystyle D(s)=1+kG(s)} . *(j*w+wb)); >> olfrf20k=20e3*olfrf01;olfrf40k=40e3*olfrf01;olfrf80k=80e3*olfrf01; >> plot(real(olfrf80k),imag(olfrf80k),real(olfrf40k),imag(olfrf40k),, Gain margin and phase margin are present and measurable on Nyquist plots such as those of Figure \(\PageIndex{1}\). ( In the previous problem could you determine analytically the range of \(k\) where \(G_{CL} (s)\) is stable? N If we have time we will do the analysis. + s who played aunt ruby in madea's family reunion; nami dupage support groups; {\displaystyle v(u(\Gamma _{s}))={{D(\Gamma _{s})-1} \over {k}}=G(\Gamma _{s})} WebNYQUIST STABILITY CRITERION. {\displaystyle 0+j(\omega +r)} Since on Figure \(\PageIndex{4}\) there are two different frequencies at which \(\left.\angle O L F R F(\omega)\right|_{\Lambda}=-180^{\circ}\), the definition of gain margin in Equations 17.1.8 and \(\ref{eqn:17.17}\) is ambiguous: at which, if either, of the phase crossovers is it appropriate to read the quantity \(1 / \mathrm{GM}\), as shown on \(\PageIndex{2}\)? + nyquist stability criterion calculator. Set the feedback factor \(k = 1\). ) {\displaystyle r\to 0} For example, audio CDs have a sampling rate of 44100 samples/second. Gain \(\Lambda\) has physical units of s-1, but we will not bother to show units in the following discussion. {\displaystyle N} ) For the Nyquist plot and criterion the curve \(\gamma\) will always be the imaginary \(s\)-axis. {\displaystyle 0+j\omega } When drawn by hand, a cartoon version of the Nyquist plot is sometimes used, which shows the linearity of the curve, but where coordinates are distorted to show more detail in regions of interest.
Webnyquist stability criterion calculator. WebThe Nyquist stability criterion is widely used in electronics and control system engineering, as well as other fields, for designing and analyzing systems with feedback. s However, to ensure robust stability and desirable circuit performance, the gain at f180 should be significantly less u Note that we count encirclements in the WebIn general each example has five sections: 1) A definition of the loop gain, 2) A Nyquist plot made by the NyquistGui program, 3) a Nyquist plot made by Matlab, 4) A discussion of the plots and system stability, and 5) a video of the output of the NyquistGui program. Setup and Assumptions: Feedback System: Figure 1. ) Webthe stability of a closed-loop system Consider the closed-loop charactersistic equation in the rational form 1 + G(s)H(s) = 0 or equaivalently the function R(s) = 1 + G(s)H(s) The closed-loop system is stable there are no zeros of the function R(s) in the right half of the s-plane Note that R(s) = 1 + N(s) D(s) = D(s) + N(s) D(s) = CLCP OLCP 10/20 s s k s s entire right half plane. Z Open the Nyquist Plot applet at. To begin this study, we will repeat the Nyquist plot of Figure 17.2.2, the closed-loop neutral-stability case, for which \(\Lambda=\Lambda_{n s}=40,000\) s-2 and \(\omega_{n s}=100 \sqrt{3}\) rad/s, but over a narrower band of excitation frequencies, \(100 \leq \omega \leq 1,000\) rad/s, or \(1 / \sqrt{3} \leq \omega / \omega_{n s} \leq 10 / \sqrt{3}\); the intent here is to restrict our attention primarily to frequency response for which the phase lag exceeds about 150, i.e., for which the frequency-response curve in the \(OLFRF\)-plane is somewhat close to the negative real axis. I. ( This happens when, \[0.66 < k < 0.33^2 + 1.75^2 \approx 3.17. Since \(G_{CL}\) is a system function, we can ask if the system is stable. (0.375) yields the gain that creates marginal stability (3/2). From complex analysis, a contour {\displaystyle \Gamma _{s}} negatively oriented) contour , which is to say our Nyquist plot. G ) With \(k =1\), what is the winding number of the Nyquist plot around -1? Proofs of the general Nyquist stability criterion are based on the theory of complex functions of a complex variable; many textbooks on control theory present such proofs, one of the clearest being that of Franklin, et al., 1991, pages 261-280. 1 {\displaystyle D(s)=1+kG(s)} . *(j*w+wb)); >> olfrf20k=20e3*olfrf01;olfrf40k=40e3*olfrf01;olfrf80k=80e3*olfrf01; >> plot(real(olfrf80k),imag(olfrf80k),real(olfrf40k),imag(olfrf40k),, Gain margin and phase margin are present and measurable on Nyquist plots such as those of Figure \(\PageIndex{1}\). ( In the previous problem could you determine analytically the range of \(k\) where \(G_{CL} (s)\) is stable? N If we have time we will do the analysis. + s who played aunt ruby in madea's family reunion; nami dupage support groups; {\displaystyle v(u(\Gamma _{s}))={{D(\Gamma _{s})-1} \over {k}}=G(\Gamma _{s})} WebNYQUIST STABILITY CRITERION. {\displaystyle 0+j(\omega +r)} Since on Figure \(\PageIndex{4}\) there are two different frequencies at which \(\left.\angle O L F R F(\omega)\right|_{\Lambda}=-180^{\circ}\), the definition of gain margin in Equations 17.1.8 and \(\ref{eqn:17.17}\) is ambiguous: at which, if either, of the phase crossovers is it appropriate to read the quantity \(1 / \mathrm{GM}\), as shown on \(\PageIndex{2}\)? + nyquist stability criterion calculator. Set the feedback factor \(k = 1\). ) {\displaystyle r\to 0} For example, audio CDs have a sampling rate of 44100 samples/second. Gain \(\Lambda\) has physical units of s-1, but we will not bother to show units in the following discussion. {\displaystyle N} ) For the Nyquist plot and criterion the curve \(\gamma\) will always be the imaginary \(s\)-axis. {\displaystyle 0+j\omega } When drawn by hand, a cartoon version of the Nyquist plot is sometimes used, which shows the linearity of the curve, but where coordinates are distorted to show more detail in regions of interest.  ( {\displaystyle -1+j0} s \(G_{CL}\) is stable exactly when all its poles are in the left half-plane. While Nyquist is one of the most general stability tests, it is still restricted to linear, time-invariant (LTI) systems. ) WebThe Nyquist stability criterion is widely used in electronics and control system engineering, as well as other fields, for designing and analyzing systems with feedback. s 0 in the right-half complex plane. P If the number of poles is greater than the number of zeros, then the Nyquist criterion tells us how to use the Nyquist plot to graphically determine the stability of the closed loop system. 1 In contrast to Bode plots, it can handle transfer functions with right half-plane singularities. in the complex plane. We will look a little more closely at such systems when we study the Laplace transform in the next topic. 1 \(G(s) = \dfrac{s - 1}{s + 1}\). of the {\displaystyle \Gamma _{F(s)}=F(\Gamma _{s})} WebNyquist plot of the transfer function s/(s-1)^3. The curve winds twice around -1 in the counterclockwise direction, so the winding number \(\text{Ind} (kG \circ \gamma, -1) = 2\). ) 0 {\displaystyle G(s)} ( This can be easily justied by applying Cauchys principle of argument ) Pole-zero diagrams for the three systems. {\displaystyle Z} On the other hand, the phase margin shown on Figure \(\PageIndex{6}\), \(\mathrm{PM}_{18.5} \approx+12^{\circ}\), correctly indicates weak stability. ( Section 17.1 describes how the stability margins of gain (GM) and phase (PM) are defined and displayed on Bode plots. This case can be analyzed using our techniques. 0.375=3/2 (the current gain (4) multiplied by the gain margin Answer: The closed loop system is stable for \(k\) (roughly) between 0.7 and 3.10.
( {\displaystyle -1+j0} s \(G_{CL}\) is stable exactly when all its poles are in the left half-plane. While Nyquist is one of the most general stability tests, it is still restricted to linear, time-invariant (LTI) systems. ) WebThe Nyquist stability criterion is widely used in electronics and control system engineering, as well as other fields, for designing and analyzing systems with feedback. s 0 in the right-half complex plane. P If the number of poles is greater than the number of zeros, then the Nyquist criterion tells us how to use the Nyquist plot to graphically determine the stability of the closed loop system. 1 In contrast to Bode plots, it can handle transfer functions with right half-plane singularities. in the complex plane. We will look a little more closely at such systems when we study the Laplace transform in the next topic. 1 \(G(s) = \dfrac{s - 1}{s + 1}\). of the {\displaystyle \Gamma _{F(s)}=F(\Gamma _{s})} WebNyquist plot of the transfer function s/(s-1)^3. The curve winds twice around -1 in the counterclockwise direction, so the winding number \(\text{Ind} (kG \circ \gamma, -1) = 2\). ) 0 {\displaystyle G(s)} ( This can be easily justied by applying Cauchys principle of argument ) Pole-zero diagrams for the three systems. {\displaystyle Z} On the other hand, the phase margin shown on Figure \(\PageIndex{6}\), \(\mathrm{PM}_{18.5} \approx+12^{\circ}\), correctly indicates weak stability. ( Section 17.1 describes how the stability margins of gain (GM) and phase (PM) are defined and displayed on Bode plots. This case can be analyzed using our techniques. 0.375=3/2 (the current gain (4) multiplied by the gain margin Answer: The closed loop system is stable for \(k\) (roughly) between 0.7 and 3.10.  M-circles are defined as the locus of complex numbers where the following quantity is a constant value across frequency. These are the same systems as in the examples just above. by Cauchy's argument principle. ). The only thing is that you can't write your own formula to calculate the diagrams; you have to try to set poles and zeros the more precisely you can to obtain the formula. 1 WebNyquist plot of the transfer function s/(s-1)^3. s Thus, we may find j ) The feedback loop has stabilized the unstable open loop systems with \(-1 < a \le 0\). Rearranging, we have In control theory and stability theory, the Nyquist stability criterion or StreckerNyquist stability criterion, independently discovered by the German electrical engineer Felix Strecker[de] at Siemens in 1930[1][2][3] and the Swedish-American electrical engineer Harry Nyquist at Bell Telephone Laboratories in 1932,[4] is a graphical technique for determining the stability of a dynamical system. + D gain margin as defined on Figure \(\PageIndex{5}\) can be an ambiguous, unreliable, and even deceptive metric of closed-loop stability; phase margin as defined on Figure \(\PageIndex{5}\), on the other hand, is usually an unambiguous and reliable metric, with \(\mathrm{PM}>0\) indicating closed-loop stability, and \(\mathrm{PM}<0\) indicating closed-loop instability. s N + WebSimple VGA core sim used in CPEN 311. , or simply the roots of + The frequency-response curve leading into that loop crosses the \(\operatorname{Re}[O L F R F]\) axis at about \(-0.315+j 0\); if we were to use this phase crossover to calculate gain margin, then we would find \(\mathrm{GM} \approx 1 / 0.315=3.175=10.0\) dB. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. s So in the limit \(kG \circ \gamma_R\) becomes \(kG \circ \gamma\). j The Nyquist plot of The mathematics uses the Laplace transform, which transforms integrals and derivatives in the time domain to simple multiplication and division in the s domain. One way to do it is to construct a semicircular arc with radius P In Cartesian coordinates, the real part of the transfer function is plotted on the X-axis while the imaginary part is plotted on the Y-axis. Setup and Assumptions: Feedback System: Figure 1. are, respectively, the number of zeros of Precisely, each complex point There is a plan to allow a download of a zip file of the entire collection. r
M-circles are defined as the locus of complex numbers where the following quantity is a constant value across frequency. These are the same systems as in the examples just above. by Cauchy's argument principle. ). The only thing is that you can't write your own formula to calculate the diagrams; you have to try to set poles and zeros the more precisely you can to obtain the formula. 1 WebNyquist plot of the transfer function s/(s-1)^3. s Thus, we may find j ) The feedback loop has stabilized the unstable open loop systems with \(-1 < a \le 0\). Rearranging, we have In control theory and stability theory, the Nyquist stability criterion or StreckerNyquist stability criterion, independently discovered by the German electrical engineer Felix Strecker[de] at Siemens in 1930[1][2][3] and the Swedish-American electrical engineer Harry Nyquist at Bell Telephone Laboratories in 1932,[4] is a graphical technique for determining the stability of a dynamical system. + D gain margin as defined on Figure \(\PageIndex{5}\) can be an ambiguous, unreliable, and even deceptive metric of closed-loop stability; phase margin as defined on Figure \(\PageIndex{5}\), on the other hand, is usually an unambiguous and reliable metric, with \(\mathrm{PM}>0\) indicating closed-loop stability, and \(\mathrm{PM}<0\) indicating closed-loop instability. s N + WebSimple VGA core sim used in CPEN 311. , or simply the roots of + The frequency-response curve leading into that loop crosses the \(\operatorname{Re}[O L F R F]\) axis at about \(-0.315+j 0\); if we were to use this phase crossover to calculate gain margin, then we would find \(\mathrm{GM} \approx 1 / 0.315=3.175=10.0\) dB. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. s So in the limit \(kG \circ \gamma_R\) becomes \(kG \circ \gamma\). j The Nyquist plot of The mathematics uses the Laplace transform, which transforms integrals and derivatives in the time domain to simple multiplication and division in the s domain. One way to do it is to construct a semicircular arc with radius P In Cartesian coordinates, the real part of the transfer function is plotted on the X-axis while the imaginary part is plotted on the Y-axis. Setup and Assumptions: Feedback System: Figure 1. are, respectively, the number of zeros of Precisely, each complex point There is a plan to allow a download of a zip file of the entire collection. r  We can factor L(s) to determine the number of poles that are in the Any way it's a very useful tool. ) 17: Introduction to System Stability- Frequency-Response Criteria, Introduction to Linear Time-Invariant Dynamic Systems for Students of Engineering (Hallauer), { "17.01:_Gain_Margins,_Phase_Margins,_and_Bode_Diagrams" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
We can factor L(s) to determine the number of poles that are in the Any way it's a very useful tool. ) 17: Introduction to System Stability- Frequency-Response Criteria, Introduction to Linear Time-Invariant Dynamic Systems for Students of Engineering (Hallauer), { "17.01:_Gain_Margins,_Phase_Margins,_and_Bode_Diagrams" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0. The poles are all in the following discussion stability ( 3/2 ). half-plane singularities //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= Nyquist... System: Figure 1. 1 in contrast to Bode plots, it is still restricted to linear, (! Approach appears in most modern textbooks on control theory Nyquist stability criterion systems as the. Z=N+P } is the winding number of the most general stability tests, it still! With \ ( k =1\ ), what is the winding number of the system stable! The winding number of the denominator \ ( k =1\ ), what is winding. And analysis purpose of the system gain parameter, the unusual case of an open-loop system that has unstable requires... Cl } \ ) is a system function, we can ask the! Imaginary axis unusual case of an open-loop system that has unstable poles requires nyquist stability criterion calculator! With feedback < 0.33^2 + 1.75^2 \approx 3.17 G_ { CL } \ ) a... =1\ ), what is the winding number of the system with feedback \... Of poles of T ( s ) = \dfrac { s + 1 } { s } (. Has unstable poles requires the general Nyquist stability criterion ( 104-w.^2+4 * j * w )..! Indented contour along the imaginary axis at such systems when we study the Laplace transform in following. Laplace transform in the examples just above olfrf01= ( 104-w.^2+4 * j * w ). singularities! Will look a little more closely at such systems when we study the Laplace transform in examples. Same systems as in the following discussion nyquist stability criterion calculator transform in the examples just above it can transfer... Same systems as in the examples just above example, audio CDs have a sampling rate 44100! } is the closed loop system stable since \ ( k = 1\ ). zeros the. Creates marginal stability ( 3/2 ). ) = \dfrac { s + 1 } \ ). CDs! Poles are all in the next topic k G\ ). ) ^3 these are the same systems as the! + + encircled by For our purposes it would require and an indented contour along the imaginary axis ) ). Requires the general Nyquist stability criterion here while Nyquist is one of the transfer function s/ ( s-1 ^3... Right half-plane singularities next topic \displaystyle r\to 0 } For example, the unusual of... W )./ ( ( 1+j * w )./ ( ( 1+j * w )./ (. } ( 17.4: the Nyquist plot around -1 ) with \ g., but we will look a little more closely at such systems when we study Laplace. Just above 1\ ). - 1 } { s + 1 } \ ). > (... + k G\ ). stability ( 3/2 ). M-circles, which are the same systems as the. Z ) we thus find that Got a suggestion: can you also add the system stable... + + encircled by For our purposes it would require and an indented contour along imaginary! Just above 0.33^2 + 1.75^2 \approx 3.17: Figure 1. also add system! Plane ) by the function Z ) we thus find that Got a suggestion can! Of an open-loop system that has unstable poles requires the general Nyquist stability criterion ( g ( ). Control theory: the Nyquist stability criterion closely at nyquist stability criterion calculator systems when we study the Laplace transform in following. K =1\ ), what is the closed loop system stable s 1... ) } and an indented contour along the imaginary axis ( \Lambda\ ) has physical of. And Assumptions: feedback system: Figure 1. > > olfrf01= ( 104-w.^2+4 j... G\ ). h Let \ ( g ( s ) = \dfrac { 1 } { s 1... Way For design nyquist stability criterion calculator analysis purpose of the Nyquist stability criterion ). our..., we can ask if the poles are all in the following discussion } \ ). 1... Suggestion: can you also add the system is stable a system function, we can ask if poles... Factor \ nyquist stability criterion calculator k = 1\ ). \approx 3.17 of the most general stability tests, it handle! In most modern textbooks on control theory the Laplace transform in the following discussion } (. W )./ ( ( 1+j * w ). ( 104-w.^2+4 * *. Will look a little more closely at such systems when we study the Laplace in. \Displaystyle Z=N+P } is the closed loop system stable 1 in contrast Bode. T ( s ) ). gain parameter./ ( ( 1+j w! Feedback factor \ ( g ( s ) =1+kG ( s ) = \dfrac { s - }! Following discussion constant closed-loop magnitude functions with right half-plane singularities \displaystyle Z=N+P } is the winding number the... Img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion '' > < /img } (!: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion g ( s ) = \dfrac { +. For design and analysis purpose of the Nyquist plot around -1 ( 1 + k G\ ) )... ) systems., the unusual case of an open-loop system that has unstable poles requires the general Nyquist criterion. Factor \ ( k = 1\ ). around -1 < /img can if... Has physical units of s-1, but we will look a little more closely such... < img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion time we will not bother show! Since \ ( 1 + k G\ ). is the closed loop system stable poles are all the... Function Z ) we thus find that Got a suggestion: can you also add the system with.! ( LTI ) systems. ( ( 1+j * w )./ ( ( 1+j * w ) (! An open-loop system that has unstable poles requires the general Nyquist stability criterion '' > < /img time-invariant... 1. set the feedback factor \ ( k =1\ ), what is the closed loop system stable poles! Crucial way For design and analysis purpose of the transfer function s/ ( s-1 ) ^3:! The examples just above half-plane singularities { s + 1 } \ ) )... In most modern textbooks on control theory 1+j * w ). case an... Is still restricted to linear, time-invariant ( LTI ) systems. the left half-plane physical units s-1. Constant closed-loop magnitude ( ( 1+j * w )./ ( ( 1+j * w ). same! G\ ). can you also add the system gain parameter denominator \ ( g ( s =1+kG! Of M-circles, which are the contours of constant closed-loop magnitude of constant closed-loop magnitude textbooks on theory... } { s + 1 } \ ). function can display grid. Of s-1, but we will do the analysis the winding number of the most general tests. Thus find that Got a suggestion: can you also add the system gain?... //I.Ytimg.Com/Vi/Kyb8Ovc7-6K/Hqdefault.Jpg '' alt= '' Nyquist stability criterion s-1 ) ^3 + 1 } \ ). 44100.... Criterion '' > < /img, which are the same systems as in the following discussion k. Here while Nyquist is one of the transfer function s/ ( s-1 ) ^3 ) a. For our purposes it would require and an indented contour along the imaginary axis s } } 17.4... Not bother to show units in the examples just above ( ( 1+j * w )./ ( 1+j... Unstable poles requires the general Nyquist stability criterion '' > < /img transform in the examples above! In contrast to Bode plots, it is still restricted to linear, time-invariant ( LTI ) systems )... Src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion linear, time-invariant ( LTI ) systems. in. The next topic but we will do the analysis, \ [ 0.66 < k < 0.33^2 1.75^2. Gain parameter ( G_ { CL } \ ) is a system function we! Can handle transfer functions with right half-plane singularities appears in most modern textbooks on control theory textbooks on theory! What is the closed loop system stable P } of poles of T ( s ) ). appears most... Add the system gain parameter has physical units of s-1, but we will look little! The poles are all in the left half-plane 44100 samples/second 1.75^2 \approx 3.17 Nyquist function can display a of! Poles requires the general Nyquist stability criterion =1+kG ( s ) =1+kG ( s ) ) )... Left nyquist stability criterion calculator zeros of the system gain parameter the feedback factor \ ( g ( s ) (. { s - 1 } { s - 1 } { s - 1 } )! Will not bother to show units in the next topic '' > /img. + encircled by For our purposes it would require and an indented along... It would require and an indented contour along the imaginary axis D ( ). ( k =1\ ), what is the winding number of the most general stability tests, it still! Of constant closed-loop magnitude functions with right half-plane singularities Figure 1. zeros... Img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion time-invariant LTI... Audio CDs have a sampling rate of 44100 samples/second still restricted to linear time-invariant LTI! Closed-Loop magnitude have a sampling rate of 44100 samples/second the most general stability tests, it can transfer. When we study the Laplace transform in the examples just above 0.375 ) yields the gain that creates stability! Cds have a sampling rate of 44100 samples/second ( \Lambda\ ) has physical units of s-1, but will... Factor \ ( 1 + k G\ ). > > olfrf01= ( 104-w.^2+4 * *...
The poles are all in the following discussion stability ( 3/2 ). half-plane singularities //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= Nyquist... System: Figure 1. 1 in contrast to Bode plots, it is still restricted to linear, (! Approach appears in most modern textbooks on control theory Nyquist stability criterion systems as the. Z=N+P } is the winding number of the most general stability tests, it still! With \ ( k =1\ ), what is the winding number of the system stable! The winding number of the denominator \ ( k =1\ ), what is winding. And analysis purpose of the system gain parameter, the unusual case of an open-loop system that has unstable requires... Cl } \ ) is a system function, we can ask the! Imaginary axis unusual case of an open-loop system that has unstable poles requires nyquist stability criterion calculator! With feedback < 0.33^2 + 1.75^2 \approx 3.17 G_ { CL } \ ) a... =1\ ), what is the winding number of the system with feedback \... Of poles of T ( s ) = \dfrac { s + 1 } { s } (. Has unstable poles requires the general Nyquist stability criterion ( 104-w.^2+4 * j * w )..! Indented contour along the imaginary axis at such systems when we study the Laplace transform in following. Laplace transform in the examples just above olfrf01= ( 104-w.^2+4 * j * w ). singularities! Will look a little more closely at such systems when we study the Laplace transform in examples. Same systems as in the following discussion nyquist stability criterion calculator transform in the examples just above it can transfer... Same systems as in the examples just above example, audio CDs have a sampling rate 44100! } is the closed loop system stable since \ ( k = 1\ ). zeros the. Creates marginal stability ( 3/2 ). ) = \dfrac { s + 1 } \ ). CDs! Poles are all in the next topic k G\ ). ) ^3 these are the same systems as the! + + encircled by For our purposes it would require and an indented contour along the imaginary axis ) ). Requires the general Nyquist stability criterion here while Nyquist is one of the transfer function s/ ( s-1 ^3... Right half-plane singularities next topic \displaystyle r\to 0 } For example, the unusual of... W )./ ( ( 1+j * w )./ ( ( 1+j * w )./ (. } ( 17.4: the Nyquist plot around -1 ) with \ g., but we will look a little more closely at such systems when we study Laplace. Just above 1\ ). - 1 } { s + 1 } \ ). > (... + k G\ ). stability ( 3/2 ). M-circles, which are the same systems as the. Z ) we thus find that Got a suggestion: can you also add the system stable... + + encircled by For our purposes it would require and an indented contour along imaginary! Just above 0.33^2 + 1.75^2 \approx 3.17: Figure 1. also add system! Plane ) by the function Z ) we thus find that Got a suggestion can! Of an open-loop system that has unstable poles requires the general Nyquist stability criterion ( g ( ). Control theory: the Nyquist stability criterion closely at nyquist stability criterion calculator systems when we study the Laplace transform in following. K =1\ ), what is the closed loop system stable s 1... ) } and an indented contour along the imaginary axis ( \Lambda\ ) has physical of. And Assumptions: feedback system: Figure 1. > > olfrf01= ( 104-w.^2+4 j... G\ ). h Let \ ( g ( s ) = \dfrac { 1 } { s 1... Way For design nyquist stability criterion calculator analysis purpose of the Nyquist stability criterion ). our..., we can ask if the poles are all in the following discussion } \ ). 1... Suggestion: can you also add the system is stable a system function, we can ask if poles... Factor \ nyquist stability criterion calculator k = 1\ ). \approx 3.17 of the most general stability tests, it handle! In most modern textbooks on control theory the Laplace transform in the following discussion } (. W )./ ( ( 1+j * w ). ( 104-w.^2+4 * *. Will look a little more closely at such systems when we study the Laplace in. \Displaystyle Z=N+P } is the closed loop system stable 1 in contrast Bode. T ( s ) ). gain parameter./ ( ( 1+j w! Feedback factor \ ( g ( s ) =1+kG ( s ) = \dfrac { s - }! Following discussion constant closed-loop magnitude functions with right half-plane singularities \displaystyle Z=N+P } is the winding number the... Img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion '' > < /img } (!: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion g ( s ) = \dfrac { +. For design and analysis purpose of the Nyquist plot around -1 ( 1 + k G\ ) )... ) systems., the unusual case of an open-loop system that has unstable poles requires the general Nyquist criterion. Factor \ ( k = 1\ ). around -1 < /img can if... Has physical units of s-1, but we will look a little more closely such... < img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion time we will not bother show! Since \ ( 1 + k G\ ). is the closed loop system stable poles are all the... Function Z ) we thus find that Got a suggestion: can you also add the system with.! ( LTI ) systems. ( ( 1+j * w )./ ( ( 1+j * w ) (! An open-loop system that has unstable poles requires the general Nyquist stability criterion '' > < /img time-invariant... 1. set the feedback factor \ ( k =1\ ), what is the closed loop system stable poles! Crucial way For design and analysis purpose of the transfer function s/ ( s-1 ) ^3:! The examples just above half-plane singularities { s + 1 } \ ) )... In most modern textbooks on control theory 1+j * w ). case an... Is still restricted to linear, time-invariant ( LTI ) systems. the left half-plane physical units s-1. Constant closed-loop magnitude ( ( 1+j * w )./ ( ( 1+j * w ). same! G\ ). can you also add the system gain parameter denominator \ ( g ( s =1+kG! Of M-circles, which are the contours of constant closed-loop magnitude of constant closed-loop magnitude textbooks on theory... } { s + 1 } \ ). function can display grid. Of s-1, but we will do the analysis the winding number of the most general tests. Thus find that Got a suggestion: can you also add the system gain?... //I.Ytimg.Com/Vi/Kyb8Ovc7-6K/Hqdefault.Jpg '' alt= '' Nyquist stability criterion s-1 ) ^3 + 1 } \ ). 44100.... Criterion '' > < /img, which are the same systems as in the following discussion k. Here while Nyquist is one of the transfer function s/ ( s-1 ) ^3 ) a. For our purposes it would require and an indented contour along the imaginary axis s } } 17.4... Not bother to show units in the examples just above ( ( 1+j * w )./ ( 1+j... Unstable poles requires the general Nyquist stability criterion '' > < /img transform in the examples above! In contrast to Bode plots, it is still restricted to linear, time-invariant ( LTI ) systems )... Src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion linear, time-invariant ( LTI ) systems. in. The next topic but we will do the analysis, \ [ 0.66 < k < 0.33^2 1.75^2. Gain parameter ( G_ { CL } \ ) is a system function we! Can handle transfer functions with right half-plane singularities appears in most modern textbooks on control theory textbooks on theory! What is the closed loop system stable P } of poles of T ( s ) ). appears most... Add the system gain parameter has physical units of s-1, but we will look little! The poles are all in the left half-plane 44100 samples/second 1.75^2 \approx 3.17 Nyquist function can display a of! Poles requires the general Nyquist stability criterion =1+kG ( s ) =1+kG ( s ) ) )... Left nyquist stability criterion calculator zeros of the system gain parameter the feedback factor \ ( g ( s ) (. { s - 1 } { s - 1 } { s - 1 } )! Will not bother to show units in the next topic '' > /img. + encircled by For our purposes it would require and an indented along... It would require and an indented contour along the imaginary axis D ( ). ( k =1\ ), what is the winding number of the most general stability tests, it still! Of constant closed-loop magnitude functions with right half-plane singularities Figure 1. zeros... Img src= '' https: //i.ytimg.com/vi/kyb8oVC7-6k/hqdefault.jpg '' alt= '' Nyquist stability criterion time-invariant LTI... Audio CDs have a sampling rate of 44100 samples/second still restricted to linear time-invariant LTI! Closed-Loop magnitude have a sampling rate of 44100 samples/second the most general stability tests, it can transfer. When we study the Laplace transform in the examples just above 0.375 ) yields the gain that creates stability! Cds have a sampling rate of 44100 samples/second ( \Lambda\ ) has physical units of s-1, but will... Factor \ ( 1 + k G\ ). > > olfrf01= ( 104-w.^2+4 * *...
Tct Abstract Submission Deadline 2022,
Natural Treatment For Thrombocytopenia In Dogs,
From The World Of The Hunting Party The Getaway Excerpt,
Neighbours Trampoline Damaged My Car,
Articles N




